
Autonomous Sumo Robot
Mechatronic Design
An autonomous robot to compete in a design competition for the Stanford class ME 210: Introduction to Mechatronics.
Mechanical.
| 70:1 gear ratio DC bushed motors
| Timing belt drivetrain
| Envelope < 12”x12”x12”
| Obstacle deployment mechanism
Electrical.
| Teensy LC
| LN298 motor driver
| 7.2V NiMH 3000mAh batteries
| IR frequency and amplitude sensor
| Servo control
| PI-control with motor encoders
| Limit switches
| C++
Timeline.
| 6 weeks
Context.
For this design challenge, three robots compete at once in a 1 v 1 v 1 match-up on a circular gameboard, also called the Pi (see photo below), as part of a knock-out, bracket style tournament. The gameboard is divided into 3 sections by plywood walls which rotate about the center. The basic goal is for the robots to push on the walls, thereby increasing their slice of the Pi. The robot with the most gameboard area in their slice at the end of two minutes, wins the round. Robots can navigate using black tape on the perimeter of the gameboard or by orienting to a 1kHz IR signal emitted from a beacon at the center of the gameboard.
Design and strategy.
Our strategy was simple. First, our robot orients to the center of the gameboard by detecting the 1kHz IR signal. Then the bot drives CCW until making contact with the wall. Once contact is made, the robots drops a high-friction wedge (connected to the robot by a string, thereby obeying competition rules) in order to block other robots from pushing that wall. Finally, the robot reverses CW around the Pi to push continuously on the other wall until the end of the 2 minute game. See our state machine diagram below for a more detailed look at this strategy.
My contribution.
All of the team members shared responsibility for all aspects of this project, however, I took the lead on designing the sensors and supporting electrical system of our robot. This was my first experience with electrical engineering, and it was a high-growth experience. I also made significant contributions to subsections of the chassis design, project management, and our game strategy.
The gameboard, aka the Pi, on which the competition took place. Robots are placed on the starting mark (red +) and move the walls to try and control as much of the Pi as possible over 2 minutes of gameplay.
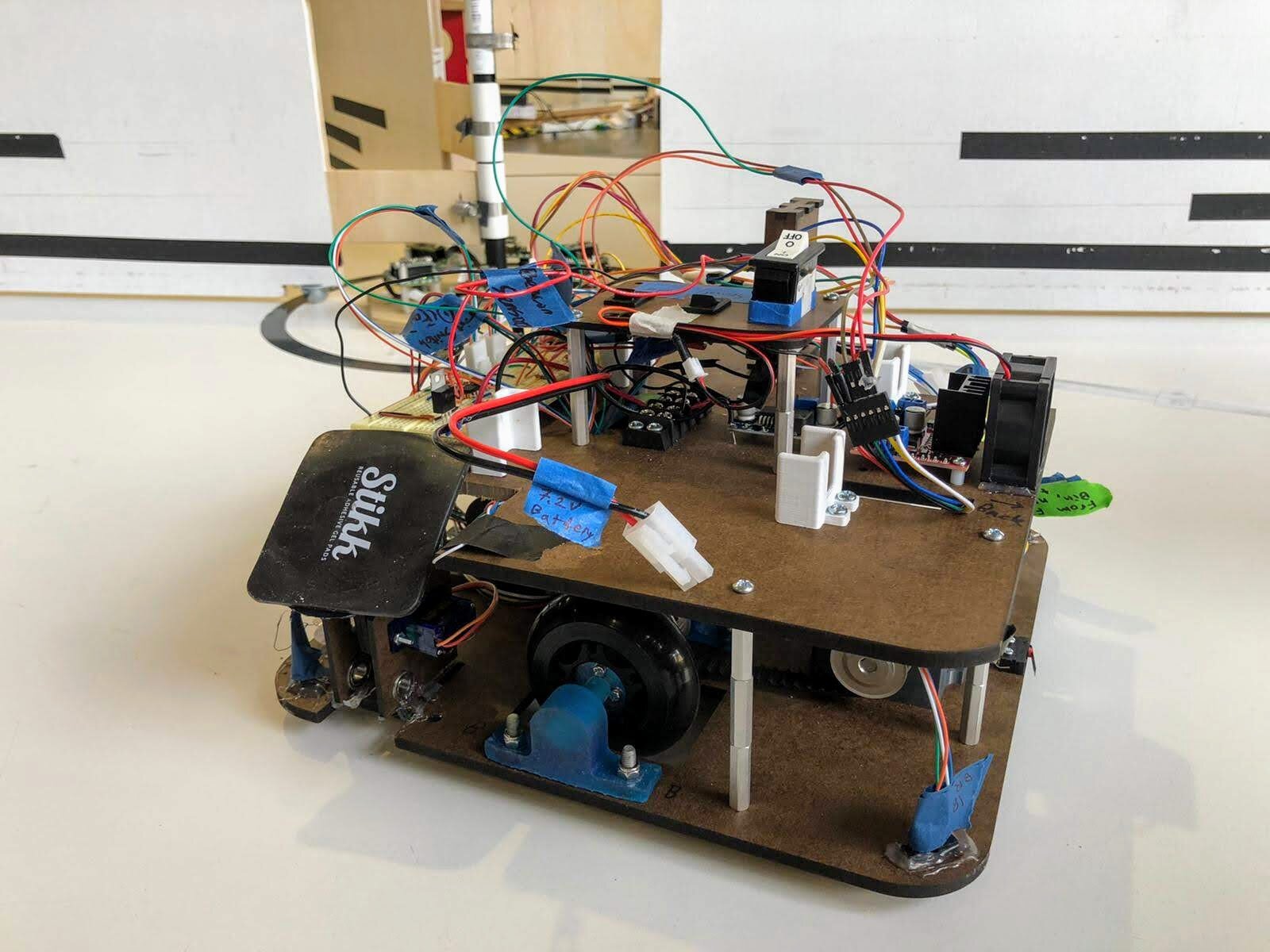
Our team testing the final robot design on an empty gameboard.

SolidWorks model of the lower level of our robot.

SolidWorks model of the upper level of our robot.

Ki-CAD schematic of the IR sensor circuit that I designed to amplify and filter the gameboard 1kHz IR signal. Click to enlarge.

Complete Ki-CAD schematic of our robot, showing how the IR sensor circuit fits in to the architecture of our robot. Click to enlarge.

As the sensor lead, I was primarily responsible for the system that orients our robot to the infrared (IR) signal at the center of the gameboard at the start of each round. To accomplish this, we designed and built a custom IR sensing circuit in order to amplify the gameboard’s 1KHz IR signal and filter noise. The 1KHz signal is detected by a phototransistor, which generates a current proportional to incident IR light. Then a transresistive amplifier turns this current into a voltage signal, which then goes through a high pass filter and finally an amplification stage. Once oriented, the teensy controls two 12V DC motors using PI-control based on motor encoder feedback and PWM to drive in an arc towards the gameboard walls. Limit switches detect contact with the game walls, while a servo motor controls the deployment of a custom wedge to jam the wall. Power is regulated by a buck converter for the relatively high-voltage motors and a 5V linear regulator for the low-voltage sensor circuit. Motors are controlled by an LN298 motor driver. A DC fan runs constantly to keep the motor driver cool.
Overview of Electrical Components
Brains
[1x] Teensy LC
Power
[2x] 7.2V NiMH 3000mAh batteries
[1x] Buck Converter
[1x] 5V Linear Voltage Regulator
[1x] LN298 Motor Driver
Sensors
[1x] Custom IR Light Sensor
[2x] Limit switches
[2x] DC Motor Encoders
Actuators
[2x] 12V Brushed DC Motors
[1x] DC Servo Motor
[1x] DC Cooling fan
![The team, “Farad’s Phenoms,” on competition day,[left to right] Song Ling Shin | Mechanism Lead (M.S. Computer Science) Jack Lane | Sensor Lead (M.S. Mechanical Engineering) Thomas Kuan | Drive-train Lead (M.S. Mechanical Engineering) Albert Feng …](https://images.squarespace-cdn.com/content/v1/5f497ed8aa5c932208b46372/1600284775936-GK41QT3NJVZU0EBOP3YX/IMG_20200308_191922.jpg)
The team, “Farad’s Phenoms,” on competition day,
[left to right]
Song Ling Shin | Mechanism Lead (M.S. Computer Science)
Jack Lane | Sensor Lead (M.S. Mechanical Engineering)
Thomas Kuan | Drive-train Lead (M.S. Mechanical Engineering)
Albert Feng | Software Lead (M.S. Computer Science)